-
Уравнение движения груза x=x(t) (x- в см, t - в секундах) 5+40t^2.
Радиус (в см) R2=30,r2=20;R1=50,r1=35.Пользуясь иллюстрацией за данным уравнением прямолинейного движения груза определите скорость и ускорение точки М механизма в момент времени, когда груз пройдёт путь S=0,34м.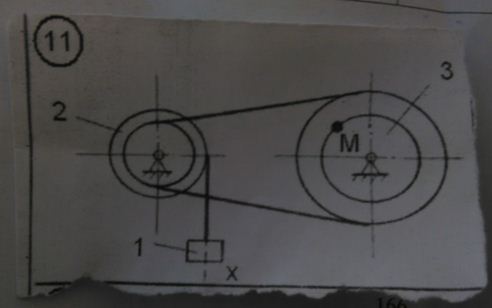
Ответы 5
-
Премного благодарен.
-
Автор:
vega - 6 лет назад
-
0
-
-
Это ВУЗ или физмат-школа?
-
Автор:
ananíasrhtg - 6 лет назад
-
0
-
-
Физмат-школа
-
Автор:
ripley - 6 лет назад
-
0
-
-
Ясно. Нудноватая задача для школы. Но нужно учиться. Забыла сказать, если это важно: Верктор ускорения точки M будет направлен нестрого вниз между радиусом и касательной к точке M. Не строго вниз – означает вниз, но не строго вертикально.
-
Автор:
kyler - 6 лет назад
-
0
-
-
;
– уравнение движения произвольной точки малого обода левого колеса вдоль самого обода.
– уравнение движения произвольной точки большого обода правого колеса вдоль самого обода.
– уравнение движения произвольной точки малого обода правого колеса вдоль самого обода, т.е. это и есть уравнение движения точки M в полярной системе, вдоль окружности обода. Итак:
;
;Продифференцировав это выражение, мы и найдём скорость и тангенциальное ускорение:
; (I)
;Нормальное ускорение можно найти из кинематики вращения:
;
;
;
; (II)
;Из условия для времени движения, найдём t :
;
;Подставим это в выражения скорости (I) и ускорения (II):
; (I*)
; (II*)Вот и всё. Остался только арифметический расчёт.В результате скорость в см/с должна получиться близкой к числу, равному пятой степени двойки, а ускорение, выраженное в см/с^2 должно получиться числом, совпадающим со вторым годом после окончания II-ой Мировой Войны.||||| ВТОРОЙ СПОСОБ (более техничный) |||||Обозначим:
и
;теперь нигде можно не учитывать размерности, они автоматически учтутся во введённых константах:
;
;Продифференцировав это выражение, мы и найдём скорость и тангенциальное ускорение:
; (I)
;Нормальное ускорение можно найти из кинематики вращения:
;
;
;
; (II)
;Из условия для времени движения, найдём t :
;
;Подставим это в выражения скорости (I) и ускорения (II):
; (I*)
; (II*)Арифметический расчёт и в этом случае, разумеется, даст те же результаты. Но сами формулы, не содержащие единиц измерения, выглядят более компактно.
-
Автор:
ignacio83 - 6 лет назад
-
0
-
-
Добавить свой ответ
Еще вопросы
-
500=3×к 17 решить уравнение
-
Предмет:
Математика -
Автор:
erickson - 6 лет назад
-
Ответов:
1 -
Смотреть
-
-
18+1\2x=0 помогите пожалуйста
-
Предмет:
Математика -
Автор:
dunndominguez - 6 лет назад
-
Ответов:
1 -
Смотреть
-
-
какая польза от мятлика
-
Предмет:
Окружающий мир -
Автор:
selah - 6 лет назад
-
Ответов:
1 -
Смотреть
-
-
Помогите умоляю!! 2целых 4/11 - 1целая 7/11 =?(дробь) Отмечу как лучший ответ .
-
Предмет:
Математика -
Автор:
goober - 6 лет назад
-
Ответов:
1 -
Смотреть
-
Топ пользователей
-

Fedoseewa27
35934 -

Askold
2792 -

Pikachu
2228 -

hobbesbowers
2116 -
kaylynnbarron676
1818 -

女fei
1240 -

yulia-kaplina
1158 -

Poinntt
946 -

Bars
930 -
Queenmagic18
770
How much to ban the user?
1 hour
1 day
100 years